



Drie-as Horisontale Draaiposisioneerder / Sweisrobotposisioneerder
Tegniese Parameters
| Vertikale Omset Triaksiale Servoposisioneerder | Horisontale Roterende Triaksiale Servoposisioneerder | ||||||
| Reeksnommer | PROJEKTE | Parameter | Parameter | OPMERKINGS | Parameter | Parameter | OPMERKINGS |
| 1 | Gegradeerde lading | 500 kg | 1000 kg | Binne 'n radius van R400 mm van die tweede as | 500 kg | 1000 kg | Binne die R400mm/R500mm radius van die tweede as |
| 2 | Standaard gyrasieradius van spil | R1200mm | R1500mm | R1200mm | R1800mm | ||
| 3 | Standaard gyrasieradius van teenas | R400mm | R500mm | R400mm | R500mm | ||
| 4 | Eerste as-omwentelingshoek | ±180° | ±180° | ±180° | ±180° | ||
| 5 | Tweede as rotasiehoek | ±360° | ±360° | ±360° | ±360° | ||
| 6 | Gegradeerde opwaartse spoed van eerste as | 50°/S | 24°/S | 50°/S | 24°/S | ||
| 7 | Gegradeerde rotasiespoed van die tweede as | 70°/S | 70°/S | 70°/S | 70°/S | ||
| 8 | Herhaal posisioneringsakkuraatheid | ±0.10mm | ±0.20mm | ±0.10mm | ±0.20mm | ||
| 9 | Grensafmeting van verplasingsraam (lengte×breedte×hoogte) | 2200 mm × 800 mm × 90 mm | 3200 mm × 1000 mm × 110 mm | 2200 mm × 800 mm × 90 mm | 3200 mm × 1000 mm × 110 mm | ||
| 10 | Algehele afmeting van posisieverskuiwer (lengte × breedte × hoogte) | 4000 mm × 700 mm × 1650 mm | 5200 mm × 1000 mm × 1850 mm | 4000 mm × 700 mm × 1650 mm | 4500 mm × 3600 mm × 1750 mm | ||
| 11 | Sentrumhoogte van die eerste asrotasie | 1350mm | 1500mm | 800mm | 1000mm | ||
| 12 | Kragtoevoertoestande | Driefase 200V ± 10% 50HZ | Driefase 200V ± 10% 50HZ | Driefase 200V ± 10% 50HZ | Driefase 200V ± 10% 50HZ | Met isolasietransformator | |
| 13 | Isolasieklas | H | H | H | H | ||
| 14 | Nettogewig van toerusting | Ongeveer 1800 kg | Ongeveer 3000 kg | Ongeveer 2000 kg | Ongeveer 2000 kg | ||
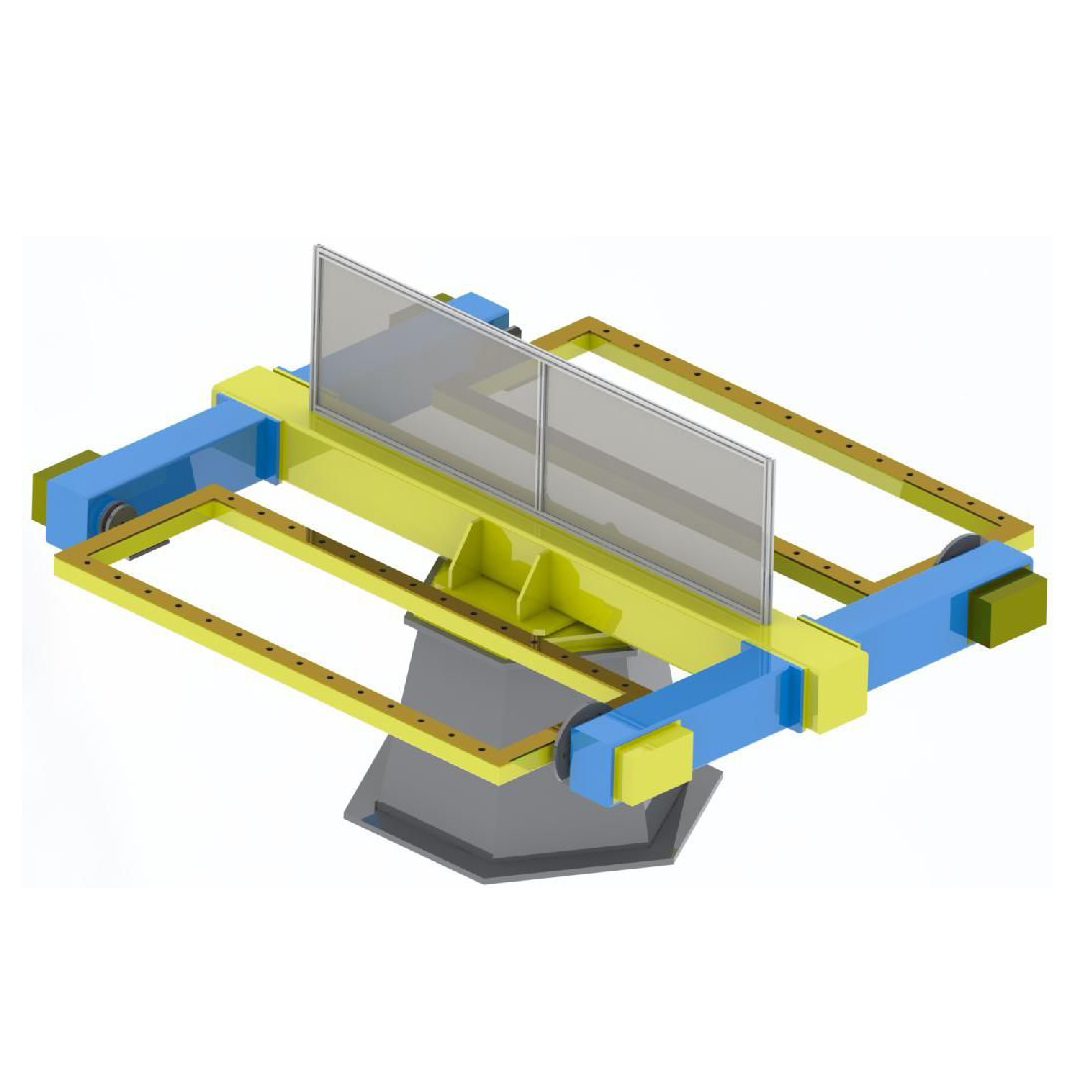
Horisontale Roterende Triaksiale Servoposisioneerder

Vertikale Omset Triaksiale Servoposisioneerder
Struktuur Inleiding
Die triaksiale vertikale omset-servoposisioneerder bestaan hoofsaaklik uit 'n gesweisde integrale raam, omsetverplasingsraam, WS-servomotor en RV-presisieverminderaar, roterende ondersteuning, geleidende meganisme, beskermende skild en elektriese beheerstelsel.
Die gesweisde integrale raam is met hoëgehalte-profiele gesweis. Na uitgloeiing en spanningsverligting moet dit deur professionele bewerking verwerk word om hoë bewerkingsakkuraatheid en akkuraatheid van sleutelposisies te verseker. Die oppervlak word met roeswerende verf gespuit, wat mooi en vrygewig is, en die kleur kan volgens die kliënt se vereistes aangepas word.
Die omdraai-verplasingsraam moet met hoëgehalte-profielstaal gesweis word en deur professionele masjinering verwerk word. Die oppervlak moet met standaard skroefdraadgate vir montering en posisionering van gereedskap gemasjineer word, en verf, swartmaak en roesvoorkomingsbehandeling moet uitgevoer word.
WS-servomotor met RV-reduksie word as die kragmeganisme gekies, wat die stabiliteit van rotasie, akkuraatheid van posisionering en
Lang duursaamheid en lae mislukkingskoers. Die geleidende meganisme is van koper gemaak, wat 'n goeie geleidende effek het. Die geleidende basis gebruik integrale isolasie, wat die servomotor, robot en sweiskragbron effektief kan beskerm.
Die elektriese beheerstelsel gebruik Japannese Omron PLC om die posisioneerder te beheer, met stabiele werkverrigting en lae mislukkingskoers. Die elektriese komponente word gekies uit bekende handelsmerke tuis en in die buiteland om die kwaliteit en stabiliteit van gebruik te verseker.
Die ligblokkerende skild word saamgestel met 'n aluminiumprofiel en 'n aluminiumplastiekplaat om te beskerm teen booglig wat tydens sweising en sny gegenereer word.








